Название всех роботов. Виды роботов
Робототехника завоевывает сегодня все большие отрасли промышленности и все плотнее внедряется в различные сферы человеческой жизни. И если раньше роботы могли выполнять роль человека, замещая его на заводах, где часто требуются однообразные действия при конвейерном производстве, например при производстве автомобилей, то теперь наступили времена, когда роботы способны оказаться и в каждом доме, чтобы помогать человеку решать насущные задачи, и способствовать экономии наших времени и сил.
Бытовые роботы, предназначенные для помощи человеку в его повседневной жизни, набирают все большую популярность, что вовсе не удивительно, ведь разнообразие роботов растет с каждым годом. Уже сегодня это и пылесосы, и газонокосилки, и мойщики окон, и чистильщики бассейнов, и даже снегоуборочные роботы.
Кстати, еще в 2007 году Билл Гейтс обратил внимание на значительный потенциал данного технологического направления, опубликовав статью «Робот в каждом доме», где он отразил перспективы, которые откроются обществу, благодаря внедрению бытовых роботов.
Предметом данной статьи будет краткий обзор набирающих популярность типов бытовых роботов. Мы рассмотрим несколько роботов, предназначенных для различных бытовых применений, посмотрим как они работают, что могут, как их нужно использовать, и насколько легко с ними обращаться.

Поскольку робот-пылесос является устройством автономным, то он обязательно оснащен не только аккумулятором, но и камерой, помогающей ему ориентироваться в помещении, чтобы два раза не убирать одно и то же место.
Робот просто предварительно выстраивает оптимальную карту уборки, опираясь на данные с камеры, затем приступает непосредственно к уборке, по окончании которой возвращается на место старта, связанное с зарядным устройством.
На борту пылесоса имеются все необходимые датчики (включая гироскоп), позволяющие прибору измерять расстояние до препятствия, оценивать высоту основания мебели над полом (сможет ли он под нее заехать), фиксировать столкновение, определять наличие на месте пылесборника и т.д. Интеллектуальная электроника позволяет роботу нормально ориентироваться среди мебели и стен в процессе работы.
Пылесборник компактен, и располагается недалеко от щеток. Для движения робот использует два колеса, при помощи которых он может поворачивать. Две направляющие щетки заметают мусор в направлении турбощетки, которая в свою очередь направляет мусор в пылесборник, где всасывающее устройство окончательно захватывает мусор. Питается все это оборудование от емкостью в несколько ампер-часов.
Благодаря наличию гироскопа, робот-пылесос всегда «знает» угол своего наклона, и поэтому вероятность того, что он застрянет исключается. Единственный недостаток таких роботов-пылесосов — малая сила всасывания. Они подойдут для уборки гладких напольных покрытий, таких как линолеум или ламинат, но с уборкой сильно загрязненного коврового покрытия справятся вряд ли.
В любом случае, робот-пылесос способен сильно облегчить нашу жизнь. Человеку уже не придется каждый раз, когда он увидит на полу пыль, бежать за веником, чтобы подмести. Достаточно запрограммировать робота на регулярную уборку, и он будет самостоятельно осуществлять профилактику по всей квартире, по дому или даже офису.

Есть два типа роботов для мойки окон. Первый тип — робот из двух частей, в одной из которых находится управляющая электроника, а в другой — чистящий механизм. Две части крепятся к оконному стеклу с разных сторон, и держатся на нем за счет постоянных магнитов.
Сначала робот задает себе карту для работы, предварительно доезжая до каждого из краев стекла, измеряя таким образом размер поверхности которая должна быть вымыта, затем начинает мыть ее, двигаясь зигзагом.
В качестве инструментов для мытья служат четыре подушечки из микрофибры, а перемещение достигается благодаря взаимодействию постоянных магнитов и управляющего модуля.
В центре между подушечками расположено отверстие, из которого подается моющее средство. Питается устройство от встроенного литиевого аккумулятора. Человеку достаточно запустить аппарат, и он сам все сделает, используя предварительно заправленное в специальный резервуар моющее средство.

Второй тип робота-мойщика окон — робот с креплением вакуумными присосками. Такой робот имеет только один и только рабочий модуль для одной стороны окна.
Робот по сути протирает стекло, перемещаясь влево и вправо по его поверхности, без использования вращающихся подушечек. Здесь используется сменная салфетка, которую необходимо предварительно смочить моющим средством вручную.
Робот питается от сети, хотя и выполняет работу автономно, стоит его включить и установить на стекло. Есть резервный аккумулятор на случай отключения электричества в доме. Пользователю остается установить робота на стекло и включить его.

Принцип работы данных роботов заключается в следующем. Первым делом прокладывают кабель-ограничитель, по которому течет постоянный ток, и который определяет собой границу рабочей зоны робота-газонокосилки. Такая автономная газонокосилка оснащена всеми необходимыми датчиками, включая датчики препятствий, как и у роботов-пылесосов, чтобы газонокосилка могла бы объехать дерево, бордюр или клумбу.
Кабель-ограничитель необходим для того, чтобы газонокосилка не упала в водоем или не стала бы пытаться косить камни садовой дорожки, тем самым нанося себе вред. Кабелем ограждают периметр, клумбы, каменные дорожки, водоемы.
В процессе работы газонокосилка хаотично движется по площади в пределах периметра, срезая ножами траву. Некоторые модели двигаются не хаотично, а по спирали или зигзагом, это зависит от производителя.
Параметры роботов-газонокосилок отличаются. В первую очередь — шириной захвата. Согласитесь, при ширине захвата в 56 см, по сравнению с 24 см, дело пойдет и будет завершено быстрее. Мощность также имеет значение.
Газонокосилка мощностью 500 ватт и с шириной захвата в 56 см гораздо быстрее пройдет ту же площадь, что 100 ваттная модель. Аккумулятор здесь, безусловно определяет площадь, которую сможет обслужить робот на одной подзарядке. Есть роботы-газонокосилки, рассчитанные на 4 сотки, а есть — на все 30 соток.
Имеется ли в комплекте база для подзарядки, чтобы газонокосилка могла самостоятельно подъехать, подзарядиться и продолжить работу? На это потребителю необходимо обратить внимание при выборе модели, иначе придется самостоятельно носить робота на подзарядку, что не всегда удобно.
Если есть зарядная базовая станция, то человек сможет запрограммировать газонокосилку на весь сезон и не беспокоиться о графике выполнения работ по стрижке газона.

Робот имеет шнур питания и пару колес для перемещения по дну и по стенкам бассейна. В зависимости от длины провода нормируется размер бассейна, с которым сможет справиться робот. Щетки робота вращаются независимо от колес, и легко удаляют слизь и грязь, направляя ее через фильтр.
Вода вместе с грязью всасывается в фильтрующий отсек робота, затем вода выбрасывается обратно в бассейн, а грязь оседает на фильтре. Фильтр потом нужно будет просто вытащить и промыть под водой.
Робот для чистки бассейна сначала очищает дно, затем движется по стенкам, присасываясь к ним. Так, 70% времени уходит на чистку дна, а 30% - на чистку стен бассейна. Типичный бассейн площадью дна 28 кв.м. средний робот очистит за 2-3 часа.
Несмотря на то, что вода проходит через фильтр робота, всасываясь его насосом, хозяину бассейна необходимо будет как всегда использовать систему очистки воды бассейна, робот не заменит ее собой, он только очистит поверхности, но не саму воду. Тем не менее, робот избавит своего хозяина не только от необходимости чистить бассейн вручную, но и от надобности наблюдать за процессом чистки.

Наконец, робот-снегоуборщик, - актуальнейшее для наших широт решение. Вместо того, чтобы размахивать лопатой там, где не может проехать габаритная снегоуборочная техника, поможет снегоуборочный робот. Управление роботом осуществляется со смартфона по wi-fi, и выглядит это как интерактивная игра.
Поднимать и опускать ковш, перемещаться на гусеницах назад и вперед, разворачиваться, - все это может делать робот, которым оператор управляет удаленно, даже находясь дома в тепле за компьютером.
Глазами робота является видеокамера, через которую пользователь может оценивать обстановку, чтобы затем направлять робота для выполнения снегоуборочных работ.
Емкий аккумулятор, заряженный от розетки, позволит осуществлять уборку снега в течение нескольких часов без необходимости таскать снег вручную, особенно если речь идет об уборке больших территорий, вблизи строений, куда снегоуборочная техника проехать просто не может.
Как видите, ассортимент бытовых роботов сегодня довольно широк, и каждый человек наверняка найдет среди доступных сегодня на рынке именно то, что облегчит быт именно ему. Кому-то нужно регулярно чистить летний приусадебный бассейн, а кто-то замучился зимой чистить снег.
Каждый имеющий в доме животных задумается о приобретении робота-пылесоса, некоторые из которых с животными отлично ладят. Живете в районе с сильно загрязненным воздухом и окна часто становятся пыльными — робот поможет вам вымыть окна. Что уж говорить о роботе-газонокосилке, который позволит своему хозяину заниматься другими более важными делами или просто отдыхать, пока газоном занимается робот.
Андрей Повный
Настоящих роботов стали конструировать после Второй мировой войны, и они были мало похожи на гуманоидов, придуманных писателями и кинематографистами – фантастами. Эти сложные аппараты с механическими руками ничуть не походили на человеческие существа и красивых механических кукол, сделанных в XVIII веке. В наше время роботов создают уже не для развлечения публики, а для тяжелой работы на заводах, как это и заложено в изначальном названии, придуманном чешским писателем Карелом Чапеком. Благодаря достижениям кибернетики – науки, занимающейся в числе прочего созданием механизмов, воспроизводящих человеческие движения – были созданы автоматы, снабженные гибкой «кистью» (или, скорее, металлической клешней), способной захватывать различные предметы и манипулировать ими. Движения руки и кисти регулируются компьютером, который отдает роботу приказы на выполнение определенных движений и операций. Более того, благодаря развитию компьютерных программ механизмы могут адаптироваться к окружающей среде и определенным образом реагировать на воздействие внешнего мира. Они еще не могут думать, но умеют останавливаться или менять направление движения, встречаясь с какой-либо преградой.
НЕДОСТАТОК ПАМЯТИ
Одной из проблем роботов первого поколения была их память. Мы, люди, узнаем предметы потому, что за свою жизнь видели их много раз, понимаем, для чего они служат, и можем вызвать их в своем воображении. Хороший робот, по идее, должен делать то же самое. Но очень трудно создать искусственную память настолько большую, чтобы она позволяла распознавать любые предметы, оказавшиеся перед роботом. Из-за этого промышленный робот использует в своей работе ограниченный круг объектов и ограниченный набор операций. В данном случае речь идет о специализированных рабочих.
«Смелый» робот
Роботы широко используются в промышленности. Эти мыслящие машины могут заменить человека, когда нужно выполнить особо утомительное или опасное задание. В автомобильной промышленности, например, робот используется в сварке (здесь часто происходят несчастные случаи, используется пламя) и для покрытия кузова лаком (когда применяются токсичные материалы). Кроме того, робот, благодаря тому, что он управляется компьютером, может в точности воспроизводить одни и те же операции, и поэтому его используют в производстве электронных приборов – области, требующей очень точной ручной работы. По этим же соображениям промышленный робот незаменим на атомных станциях и в иных областях, где требуется особая точность или существует повышенная опасность для человека.
Современные исследования в области робототехники направлены на развитие автономности роботов, то есть на то, чтобы они могли двигаться самостоятельно, без управляющего ими человека. Для того чтобы робот обрел самостоятельность, он должен обладать заключенным внутри корпуса источником энергии и большим диапазоном функций и действий, как можно более приближенных к действиям человека. Независимых роботов можно будет использовать в опасной или непригодной для человека среде: морских глубинах, космосе, атомных станциях. На иллюстрации изображены гипотетические роботы будущего для подводных операций, опасных для человека. Подводный робот передвигается по построенной на дне установке с помощью ступней-присосок и работает двумя руками, растущими с двух сторон прямо из «головы».
ПОСЛЕ «СОДЖОРНЕРА»: ЛАПЫ ИЛИ КОЛЕСА?
Среди роботов, предназначенных для космических путешествий, есть такие, которые передвигаются с помощью ножек. Речь идет о питающихся от солнечных батарей роботах-«насекомых», которые, в отличие от колесных роботов, могут преодолевать невысокие препятствия. НАСА уже проявило большой интерес к этим новым моделям. Но тем не менее на сегодняшний день предпочтение все еще отдается «старым» – колесным – роботам. Успех космического аппарата под названием «Соджорнер» (он первым сфотографировал поверхность Марса и собрал с нее пробы) породил его младшего брата, который был назван «Номад». Это робот размером с грузовик и весом 800 кг. Больший по размерам, более устойчивый и более быстрый (до 2 км/ч), чем его предшественник «Соджорнер», «Номад» был испытан НАСА в пустыне Атакама (Чили). «Номад» показал высочайшие результаты.
РОБОТИЗИРОВАННЫЙ СУПЕРМАРКЕТ: Экспериментальная система в европейской цепи торговой сети позволяет клиентам расплачиваться за покупки кредитной карточкой, вставляя ее в щель, расположенную прямо в торговом прилавке. У покупателя нет тележки, все выбранные продукты будут лежать упакованными прямо у кассы, где будет достаточно подтвердить снятие со счета нужной суммы без каких бы то ни было чеков.
РОБОТ-ВОДОЛАЗ: Он предназначен для добывания алмазов с морского дна. Управляемый с корабля, находящегося на поверхности, он снабжен всасывающей помпой, способной собирать 50 тонн породы в час. На корабле, находящемся на поверхности, сортируется втянутая насосом порода, при этом выбираются алмазы и отбрасывается песок.
РОБОТ-ОГОРОДНИК: В Израиле уже опробован роботизированный сборщик дынь, его назвали «Ромпер» («Robotic Melon Picker* – роботизированный дынесбор-щик). Ромпера можно использовать для пересадки, выращивания и сбора растений, таких, как дыня, тыква, капуста и латук. Ромпер также может определить степень созревания растения: специальный датчик измеряет уровень природного гормона, отвечающего за созревание плодов, и может определить степень созревания каждого плода с погрешностью в один день.
Роботы. Пока еще это экзотика, но тем не менее, они все увереннее входят в нашу жизнь. Три закона роботехники Айзека Айзимова скоро перестанут быть только развлекательной литературой. Роботы – существа, которые одновременно завораживают и пугают своей человечностью и одновременно машинностью. Производство роботов развивается постоянно. Посмотрите на десятку самых интересных экземпляров на сегодняшний день.
ASIMO: Робот-гуманоид
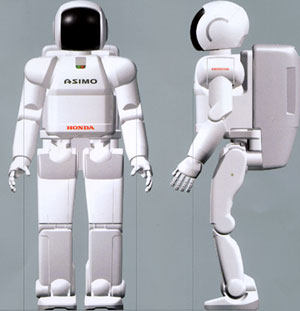
ASIMO – это робот-гуманоид, созданный компанией Хонда. Ростом в 130 сантиметров и весом в 54 килограмма, робот похож на маленького астронавта, который несет рюкзак. Он умеет ходить на двух ногах, копируя человеческую походку скоростью в 6 км/ч. ASIMO был создан в Японии в «Центре исследований и развития» Хонды. Эта последняя модель в серии, а всего их одиннадцать, первый робот был создан в 1986 году.
Официально имя робота – это сокращение от "Advanced Step in Innovative MObility", то есть буквально «Продвинутый шаг в передовой мобильности».в 2002 году существовало 20 роботов ASIMO. Каждый стоит миллион долларов за производство, и некоторые экземпляры можно взять напрокат за 150 тысяч долларов в месяц.
Распознавание движущихся объектов
Используя зрительную информацию, которую собирает вмонтированная в голову робота видеокамера, ASIMO распознает движения множества объектов, а также оценивает расстояние от них и их направление. С помощью комплекса этих технологий робот может следить за перемещениями людей камерой, следовать за человеком или поприветствовать его, когда он приближается.
Распознавание поз и жестов
ASIMO умеет интерпретировать позиции и движения руки, распознавать позы и жесты. Благодаря чему робот может реагировать не только на голосовые команды, но и на естественные телодвижения людей. Таким образом он, например, понимает, когда ему предлагают рукопожатие или когда человек ему машет, и отвечает взаимностью. Кроме того, он понимает, когда ему указывают направление движения.
Распознавание окружающей среды
ASIMO умеет анализировать окружающие объекты и ландшафт и действовать так, чтобы это было безопасно для него и находящихся рядом людей. Например, он узнает потенциально рискованные объекты, такие, как лестницы, а также останавливается или обходит людей и другие движущиеся объекты, чтобы не столкнуться с ними.
Распознавание звуков
Возможности робота распознавать род звуков углубились, и теперь он знает разницу между голосами и прочими звуками. Он отвечает на свое имя, поворачивается лицом к человеку, с которым разговаривает, реагирует на внезапные необычные звуки вроде упавшего предмета или столкновения, и поворачивает голову в этом направлении.
Распознавание лиц
ASIMO может узнавать человеческие лица, даже когда человек двигается. Он может отдельно различать 10 человеческих лиц. Когда их зарегистрируют в его памяти, он будет обращаться к ним по имени.

Albert Hubo: робот-Эйнштейн

Робот Альберт Хубо (Albert HUBO) – андроидный робот. Его внешний вид составляет голова, которая копирует голову ученого Альберта Эйнштейна, и туловище довольно известного гуманоидного робота Хубо. Период разработки составил три месяца и завершился в ноябре 2005 года. Голова была разработана компанией Hanson-Robotics. Тело сделано из специфического материала, Frubber, который частенько используют в Голливуде.
Голова имеет 35 суставов, благодаря чему может выражать различные эмоции на лице, пользуясь независимыми движениями глаз и губ. Также в голове есть две CCD камеры для визуального распознавания. Кроме того, Альберт умеет вытворять все присущие Хубо представления, поэтому возможно выражать еще больше естественных человеческих движений и манер поведения. В теле спрятаны полимерные литиевые батареи, которые обеспечивают около двух с половиной часов автономной работы робота.
С помощью удаленной сети роботом Альбертом можно управлять из внешнего компьютера. Впервые Альберт Хумо был представлен в 2005 году на саммите АПЕК в Пусане (Корея). Его похвалили многие мировые лидеры: президент США, премьер-министр Японии и т.п.

Stanley: самоуправляемое транспортное средство

Стэнли (Stanley) – это автономное средство передвижения, созданное гоночной командой Стэнфордского университета. Это обычный Фольксваген Туарег, доработанный до возможности управления только бортовыми компьютерами. Он принимал участие и победил в DARPA Grand Challenge в 2005 году и принес Стаэнфордской гоночной команде приз размером в два миллиона долларов, самый большой денежный приз за всю историю роботов.
Сенсоры, использованные в Стэнли, включают в себя пять лазерных лидаров, пару радаров, стереокамеру и однообъективную камеру. Обрабатывают информацию и определяют позицию машины GPS-приемник, GPS-компас, инерционная система управления, а информацию об одометрии колес получает внутренняя CAN шина Туарега. Компьютерная часть – это шесть мощных компьютеров Intel Pentium M с разными конфигурациями и операционными системами Линукс.
Стэнли наделена системой обнаружения приближающихся препятствий. Данные из лидаров скомбинированы с изображениями из визуальной системы, чтобы составить более полную картину обзора. Если приемлимую дорогу невозможно распознать хотя бы на ближайшие 40 метров, скорость снижается, а лидары ищут безопасный путь.
Кстати, вождение Стэнли программировали, пользуясь записью человеческого вождения в пустыне, а затем устанавливая точное значение каждому биту информации, создаваемой его системой сенсоров. После этой модификации машина-робот начала кататься со скоростью 45 миль в час по дорогам, пересеченным тенями деревьев. Пока точные значения для данных не были заданы, машина испуганно сворачивала с дороги, уверенная, что путь пересечен не тенями, а ямами.

BigDog: робот-мул

БогДог (BigDog, буквально – Большой Пес) – это четвероногий робот, созданный компанией Boston Dynamics в 2005 году. Проект БигДог финансировало Агентство защиты передовых исследований в надежде, что это создание сможет служить роботом-мулом для солдат на слишком грубой для транспорта местности.
БигДог весит 75 килограммов, он метровый в длину, а в высоты – 0, 7 метра. На данный момент он может путешествовать по тяжелой для передвижения местности со скоростью 5,3 км/ч, нести вес в 54 килограмма и карабкаться по склонам наклоном в 35 градусов.

RiSE: карабкающийся робот

Райз (RiSE) – это маленький шестилапый робот, который забирается по вертикальным поверхностям: стенам, деревьям, заборам. На пятках Райза имеются когти, микрокогти или липкий материал, в зависимости от поверхности, по которой надо лазать. Робот меняет позы, чтобы приспособиться к наклону поверхности, а зафиксированный хвост помогает балансировать на крутых поверхностях. Малыш весит всего 2 килограмма, в длину составляет 0,25 метра, бегает со скоростью 0,3 м/с.
Каждая из шести лап робота оснащена двумя электромоторами. Бортовой компьютер управляет лапами, определяет способ коммуникации с землей и обсуживает разнообразные сенсоры. В том числе сенсор, рассчитывающий инертность, сенсор позиции сустава для каждой лапы, сенсор натяжения лап и датчик контакта ступней.
Будущие версии Райза будут использовать сухое прилипание, чтобы карабкаться по совершенно гладким отвесным поверхностям, таким как стекло и металл. Райз разработали совместно исследователи Пенсильванского университета, университетов Карнеги Меллон, Беркли, Стэнфорда, а также университета Льюиса и Кларка. Проект спонсировал Офис защиты науки DARPA.
QRIO: танцующий робот

QRIO ("Quest for cuRIOsity" – «Задача для любопытства») – это двуногий гуманоидный робот для развлечения, созданный и проданный Сони, чтобы не затухал успех их игрушки AIBO (робот-собачка). QRIO обладает ростом в 0,6 метра и весит 7,3 килограмма.
Робот умеет распознавать голоса и лица, благодаря чему может запоминать людей и их пристрастия и антипатии. Он умеет бегать со скоростью 23 см в секунду, что зафиксировано в Книге рекордов Гиннеса (2005 года) как первый, самый скоростной, двуногий робот, который бегает. Робот QRIO четвертого поколения работает от батареи час.
Четвертое поколение этих роботов умеет танцевать под Hell Yes, музыкальный клип исполнителя Beck. Эти экземпляры дополнены третьей камерой на лбу, и у них улучшили руки и запястья. Программисты работали три недели, чтобы обучить этих роботов хореографии.
14.06.2006, 15:46NesterOff
Робот (чеш. robot, от robota - подневольный труд, rob - раб), машина с антропоморфным (человекоподобным) поведением, которая частично или полностью выполняет функции человека (иногда животного) при взаимодействии с окружающим миром. Первые упоминания о человекоподобных машинах встречаются ещё в древнегреческих мифах. Термин "робот" был впервые введён К. Чапеком в пьесе "R. U. R." (1920), где Роботами называли механических людей. В настоящее время робототехника превратилась в развитую область промышленности: тысячи промышленных роботов работают на различных предприятиях мира, подводные манипуляторы стали непременной принадлежностью подводных исследовательских и спасательных аппаратов, изучение космоса опирается на широкое использование роботов с различным уровнем интеллекта. С развитием робототехники определились 3 разновидности Роботов: с жёсткой программой действий; манипуляторы, управляемые человеком-оператором; с искусственным интеллектом (иногда называемые интегральными), действующие целенаправленно ("разумно") без вмешательства человека. Большинство современных Роботов (всех трёх разновидностей) - Роботы манипуляторы , хотя существуют и другие виды Роботов (например, информационные, шагающие и т. п.). Возможно объединение Роботов первой и второй разновидностей в одной машине с разделением времени их функционирования. Допустима также совместная работа человека с Роботами третьего вида (в так называемом супервизорном режиме). Первые Роботы ("андроиды" , имитировавшие движения и внешний облик человека) использовались преимущественно в развлекательных целях. С 30-х гг. в связи с автоматизацией производства Роботы - автоматы стали применять в промышленности наряду с традиционными средствами автоматизации технологических процессов, в частности в мелкосерийном производстве и особенно в цехах с вредными условиями труда.
Отсюда же можно получить информацию о термине "РОБОТИЗАЦИЯ":
Роботизация
- вытеснение людей из производительного процесса,
с заменой их на автоматизированные и роботизированные станки и производственные линии,
в связи с чем высвобождаются ресурсы для развития сферы услуг.
 Промышленный Робот
манипулятор
имеет "механическую руку"
(одну или несколько) и вынесенный пульт управления или встроенное устройство
программного управления, реже ЭВМ. Он может, например, перемещать детали массой
до нескольких десятков кг в радиусе действия его "механических рук" (до 2 м),
выполняя от 200 до 1000 перемещений в час. Промышленные Роботы
- автоматы
имеют преимущество перед человеком в скорости и точности
выполнения ручных однообразных операций. Наиболее распространены
Роботы
манипуляторы
с дистанционным управлением и "механической рукой",
закрепленной на подвижном или неподвижном основании. Оператор управляет
движением
манипулятора, одновременно наблюдая её непосредственно либо на телевизионном
экране; в последнем случае. Роботы снабжается "телевизионным глазом" -
передающей телевизионной камерой. Часто Робот оснащают обучающейся
автоматической системой управления. Если такому Роботу "показывают"
последовательность операций, то система управления фиксирует
всё в виде программы управления и затем точно воспроизводит при работе.
Роботы
манипуляторы
используют для работы в условиях относительной недоступности
либо в опасных, вредных для человека условиях, например в атомной
промышленности, где они применяются с 50-х гг. В 60-х гг. появились подводные
Роботы
манипуляторы
разнообразных конструкций и назначения: от
глубоководных управляемых аппаратов с "механическими руками" (в частности, для захвата образцов породы
со дна моря и т. д.) и ползающих по морскому дну платформ с исследовательской
аппаратурой до подводных бульдозеров и буровых установок.
Подобные манипуляторы применяются и в космонавтике, на американских "Шаттлах".
Промышленный Робот
манипулятор
имеет "механическую руку"
(одну или несколько) и вынесенный пульт управления или встроенное устройство
программного управления, реже ЭВМ. Он может, например, перемещать детали массой
до нескольких десятков кг в радиусе действия его "механических рук" (до 2 м),
выполняя от 200 до 1000 перемещений в час. Промышленные Роботы
- автоматы
имеют преимущество перед человеком в скорости и точности
выполнения ручных однообразных операций. Наиболее распространены
Роботы
манипуляторы
с дистанционным управлением и "механической рукой",
закрепленной на подвижном или неподвижном основании. Оператор управляет
движением
манипулятора, одновременно наблюдая её непосредственно либо на телевизионном
экране; в последнем случае. Роботы снабжается "телевизионным глазом" -
передающей телевизионной камерой. Часто Робот оснащают обучающейся
автоматической системой управления. Если такому Роботу "показывают"
последовательность операций, то система управления фиксирует
всё в виде программы управления и затем точно воспроизводит при работе.
Роботы
манипуляторы
используют для работы в условиях относительной недоступности
либо в опасных, вредных для человека условиях, например в атомной
промышленности, где они применяются с 50-х гг. В 60-х гг. появились подводные
Роботы
манипуляторы
разнообразных конструкций и назначения: от
глубоководных управляемых аппаратов с "механическими руками" (в частности, для захвата образцов породы
со дна моря и т. д.) и ползающих по морскому дну платформ с исследовательской
аппаратурой до подводных бульдозеров и буровых установок.
Подобные манипуляторы применяются и в космонавтике, на американских "Шаттлах".
В конце 60-х гг. в робототехнике возникло новое научное направление, связанное с созданием интеллектуальных Роботов. Такие Роботы имеют датчики очувствления (сенсорную систему), воспринимающие информацию об окружающей обстановке, устройство обработки полученной информации (искусственный интеллект) - специализированную ЭВМ с набором программ - и исполнительные механизмы (моторную систему). Действия интеллектуального Робота обладают некоторыми признаками человеческого поведения: датчики собирают информацию о предметах окружающего мира, их свойствах и взаимодействии; на основе этих данных искусственный интеллект формирует модель внешнего окружения и принимает решение о последовательности действий Робота, которые реализуются исполнительными механизмами. К 1975 интеллектуальные Роботы находились в стадии научных разработок и попыток использования их в промышленности. Работы над искусственным интеллектом проводились также и в НИИ военно-промышленного комплекса.
Робот – это универсальный автомат, позволяющий выполнять механические действия. Его принципиальной особенностью является быстрая оперативная перестройка с одной выполняемой операции на другую. Существует несколько разновидностей роботов и для каждого из них имеется своё определение. Чаще всего говорят о трёх поколениях роботов: промышленных роботах или манипуляторах, адаптивных роботах и роботах с искусственным интеллектом или как говорили раньше – интегральных роботах.
Первые шаги робототехники
 Конец 19 и начало 20 столетий характеризуется выдающимися открытиями в
области науки и техники. Появились и начали широко применяться различные
электрические устройства, генераторы тока, электрические двигатели,
аккумуляторы, были изобретены телеграф и телефон. Электрическая энергия начала
использоваться всё шире и шире. В начале 20 столетия начали интенсивно
развиваться новые науки – радиотехника, электроника. Новые научные открытия и
изобретения позволили проблему создания роботов перевести на новый, более
совершенный фундамент. Появились реальные возможности оснастить робот зрением –
фотоэлементами, слухом – микрофонами, речью – громкоговорителями.
Конец 19 и начало 20 столетий характеризуется выдающимися открытиями в
области науки и техники. Появились и начали широко применяться различные
электрические устройства, генераторы тока, электрические двигатели,
аккумуляторы, были изобретены телеграф и телефон. Электрическая энергия начала
использоваться всё шире и шире. В начале 20 столетия начали интенсивно
развиваться новые науки – радиотехника, электроника. Новые научные открытия и
изобретения позволили проблему создания роботов перевести на новый, более
совершенный фундамент. Появились реальные возможности оснастить робот зрением –
фотоэлементами, слухом – микрофонами, речью – громкоговорителями.
 В то же время начали появляться первые плоды науки, которая
позже стала называться кибернетикой. Учёные и инженеры начали разрабатывать
устройства, которых, хоть и скромно называли кибернетическими игрушками,
создавали отнюдь не для развлечения. Они служили примером практического
воплощения идей автоматического управления, моделировали поведение живых
организмов в простейших ситуациях. Большую известность среди этих кибернетических игрушек
приобрели устройства, напоминающие черепах, жуков, белок, собак и др. Первые
простейшие схемы таких устройств, способных двигаться в направлении света,
разработал основатель кибернетики Н. Винер.
В то же время начали появляться первые плоды науки, которая
позже стала называться кибернетикой. Учёные и инженеры начали разрабатывать
устройства, которых, хоть и скромно называли кибернетическими игрушками,
создавали отнюдь не для развлечения. Они служили примером практического
воплощения идей автоматического управления, моделировали поведение живых
организмов в простейших ситуациях. Большую известность среди этих кибернетических игрушек
приобрели устройства, напоминающие черепах, жуков, белок, собак и др. Первые
простейшие схемы таких устройств, способных двигаться в направлении света,
разработал основатель кибернетики Н. Винер.
Наибольшую известность приобрели три “черепашки” , созданные английским биофизиком и нейрофизиологом Г. Уолтером в 1950 – 1951 гг. Эти устройства представляют собой самодвижущиеся электромеханические игрушки, способные ползти на свет или от него, обходить препятствия, заходить в “кормушку” для подзарядки разрядившихся аккумуляторов и тому подобное. “Черепашки ” приводятся в движение с помощью двух электродвигателей, питаемых от аккумуляторов. Первый двигатель обеспечивает поступательное движение устройства, второй, расположенный на рулевой колонке, изменяет направление движения. Чувствительными элементами первых двух “черепашек ” Г. Уолтера являются фотоэлемент, расположенный на рулевой колонке, и механический контакт, замыкаемый при наезде на препятствие. Управление поведением осуществляется с помощью несложной электронной схемы с обратной связью. Несмотря на очень простое устройство, “черепашки ” демонстрируют забавные свойства. В темноте или при слабом свете они беспорядочно ползают, как будто что-то ищут. Натыкаясь на препятствие, они сворачивают и пытаются их обойти. Если имеется достаточно сильный источник света, они его скоро “замечают” и решительно направляются в его сторону (положительный тропизм). Однако подойдя к свету слишком близко, они от него отворачиваются (отрицательный тропизм). Теперь они двигаются вокруг источника света, находя для себя оптимальные условия и непрерывно поддерживая их (гомеостазис). Между двумя источниками света “черепашки ” совершают путешествия от одного к другому, наподобие буриданова осла, который, как известно, умер от голода, находясь между двумя одинаковыми копнами сена, не будучи в состоянии выбрать, какой из них вкуснее. Две черепашки “видят” и “узнают” друг друга по зажженной лампочке и ползут друг другу навстречу.
Самые современные роботы
В аптеках Шанхая работают роботы-фармацевты
.
Надо просто нажать на сенсорный экран с описанием симптомов, и робот поставит
диагноз и даст необходимые рекомендации. Дальше остается только предложить
автомату купюру, и лекарство можно забирать.
 Роботы-санитары.
Роботы-санитары.
Работают в некоторых британских больницах. Роботы производит сухую и влажную
уборку, сами выбрасывают мусор, заправляются чистящими средствами и
подзаряжаются. В отличие от живых уборщиц, никогда не бубнят
под нос и отличаются доброжелательным отношением к окружающим. Встретив кого-то
на своем пути, они извиняются и докладывают, чем они сейчас заняты.
 В Южной Корее сконструировали сторожевого робопса
для
охраны частных усадеб. Пес весит 40 кг, в его нос встроена фотокамера, а в
корпусе имеется сотовый телефон, который немедленно посылает сигнал хозяину в
случае обнаружения опасности. В критических случаях робот способен сам вызвать
полицию.
В Южной Корее сконструировали сторожевого робопса
для
охраны частных усадеб. Пес весит 40 кг, в его нос встроена фотокамера, а в
корпусе имеется сотовый телефон, который немедленно посылает сигнал хозяину в
случае обнаружения опасности. В критических случаях робот способен сам вызвать
полицию.
Робот-фотограф.
Его называют «стоп-кадр» и используют для фотографирования людей на вечеринках и
других мероприятиях. Робот сам выбирает оптимальный ракурс и наводит объектив на
лица. Как правило, 90 процентов снимков, сделанных роботом, оказываются
удачными.
 Японский семейный робот
.
Японский семейный робот
.
Он запоминает до 7 членов семьи и распознает их по лицам или голосу. Словарный
запас – 65 тыс. фраз и 1000 отдельных слов. Он держит в памяти привычки каждого
члена семьи и пытается находить к каждому подход. Он краснеет в ответ на шутку и
бледнеет в замешательстве.
И еще одно изобретения японцев - Рободансер
.
Робот-танцор способен попеременно выдавать диско, панк, фанк, рок, хипхоп, брэйк
и т.д. Заряда батареи хватает на 45 минут. За это время робот предлагает
всевозможные движения для танцующих вокруг людей. В ушах у него стерео
микрофоны, которые улавливают малейшие звуки. В начале следующего года
планируется поставить таких роботов на ведущие дискотеки мира.
 Механическая актиния.
Механическая актиния.
Зачем это нужно, непонятно, но робот точно имитируют поведение морской актинии.
У него гибкое силиконовое тело, а пять щупалец чутко реагируют на освещение и
движения внутри и за стеклом аквариума. Напуганный робот-актиния уползает в
угол.
Мисс любезность
.
Это робот – личный помощник, которого можно возить с собой на симпозиумы и
конференции. Робот Грейс самостоятельно нашла дорогу в зал заседаний, не сбив
никого на своем пути, а в зале поприветствовала всех улыбкой и взмахом руки.
Робот постоянно совершенствуется и пополняет свой словарный запас. Грейс уже
может ездить на эскалаторе, понимает несложные фразы и пытается общаться.
Крысы-киборги:
американские ученые вживили микрочип в мозг крыс. Теперь крысами можно управлять
на расстоянии 500 метров. Предполагается, что киборги будут незаменимыми в
поиске людей, оказавшихся под завалами.
 Ученые американского университета Карнеги сконструировали
робота-старика
. Это очень занимательный и милый андроид с чертами старого
горемыки из русских народный сказок. Простенькая система интеллекта позволяет
роботу сносно общаться с окружающими. При этом он по-старчески шамкает, бубнит
что-то под нос, чихает и икает. На расспросы он отвечает, что из семьи пастуха,
а главное его изобретение – это плитка шоколада. Наибольший восторг публики
робот вызывает, когда просит простить его за старческий маразм.
Ученые американского университета Карнеги сконструировали
робота-старика
. Это очень занимательный и милый андроид с чертами старого
горемыки из русских народный сказок. Простенькая система интеллекта позволяет
роботу сносно общаться с окружающими. При этом он по-старчески шамкает, бубнит
что-то под нос, чихает и икает. На расспросы он отвечает, что из семьи пастуха,
а главное его изобретение – это плитка шоколада. Наибольший восторг публики
робот вызывает, когда просит простить его за старческий маразм.
«Робот – машина. В этом можно не сомневаться, хотя, наверное, некоторые люди будут воспринимать их как домашних животных, ибо такова человеческая природа. Только стандартизация дешёвых роботов общего назначения поможет нам ещё глубже осознать бесконечное разнообразие типов человеческой внешности и поведения. Будем надеяться, что это поможет нам быть терпимее друг к другу». Дж. Янг.
Три закона робототехники для роботов
Первый Закон:
Робот
не может причинить вред человеку или своим бездействием
допустить, чтобы человеку был причинен вред.
Второй Закон:
Робот
должен повиноваться командам человека, если эти команды не
противоречат Первому Закону.
Третий Закон:
Робот
должен заботиться о своей безопасности, поскольку это не
противоречит Первому и Второму законам.
Законы для роботов сформулировал Айзек Азимов в своём произведении "Три закона робототехники
".